freud.environment.EnvironmentCluster¶
The freud.environment.EnvironmentCluster class finds and clusters local environments, as determined by the vectors pointing to neighbor particles. Neighbors can be defined by a cutoff distance or a number of nearest-neighbors, and the resulting freud.locality.NeighborList is used to enumerate a set of vectors, defining an “environment.” These environments are compared with the environments of neighboring particles to form spatial clusters, which usually correspond to grains, droplets, or
crystalline domains of a system. EnvironmentCluster has several parameters that alter its behavior, please see the documentation or helper functions below for descriptions of these parameters.
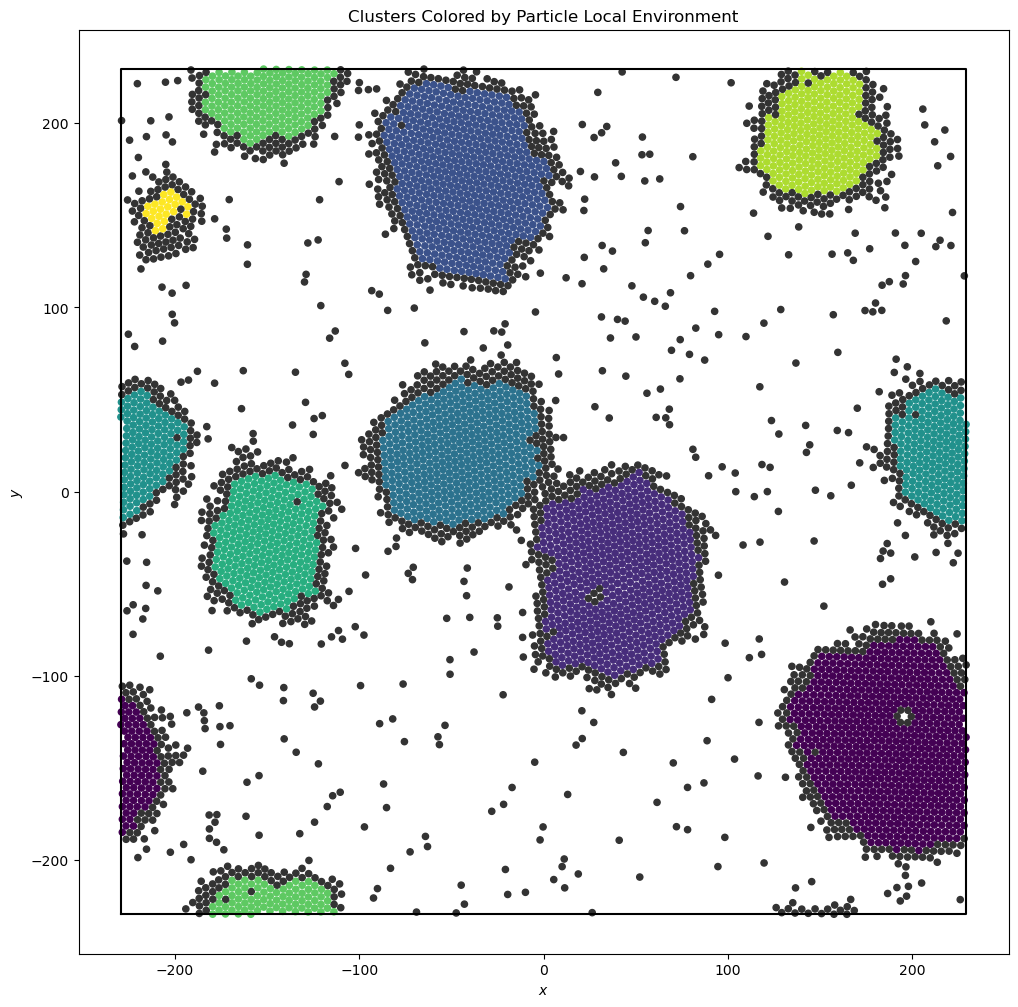
In this example, we cluster the local environments of hexagons. Clusters with 5 or fewer particles are colored dark gray.
[1]:
from collections import Counter
import freud
import matplotlib.pyplot as plt
import numpy as np
def get_cluster_arr(system, num_neighbors, threshold, registration=False):
"""Computes clusters of particles' local environments.
Args:
system:
Any object that is a valid argument to
:class:`freud.locality.NeighborQuery.from_system`.
num_neighbors (int):
Number of neighbors to consider in every particle's local environment.
threshold (float):
Maximum magnitude of the vector difference between two vectors,
below which we call them matching.
registration (bool):
Controls whether we first use brute force registration to
orient the second set of vectors such that it minimizes the
RMSD between the two sets.
Returns:
tuple(np.ndarray, dict): array of cluster indices for every particle
and a dictionary mapping from cluster_index keys to vector_array)
pairs giving all vectors associated with each environment.
"""
# Perform the env-matching calcuation
neighbors = {"num_neighbors": num_neighbors}
match = freud.environment.EnvironmentCluster()
match.compute(
system,
threshold,
cluster_neighbors=neighbors,
registration=registration,
)
return match.cluster_idx, match.cluster_environments
def color_by_clust(
cluster_index_arr,
no_color_thresh=1,
no_color="#333333",
cmap=plt.get_cmap("viridis"),
):
"""Takes a cluster_index_array for every particle and returns a
dictionary of (cluster index, hexcolor) color pairs.
Args:
cluster_index_arr (numpy.ndarray):
The array of cluster indices, one per particle.
no_color_thresh (int):
Clusters with this number of particles or fewer will be
colored with no_color.
no_color (color):
What we color particles whose cluster size is below no_color_thresh.
cmap (color map):
The color map we use to color all particles whose
cluster size is above no_color_thresh.
"""
# Count to find most common clusters
cluster_counts = Counter(cluster_index_arr)
# Re-label the cluster indices by size
color_count = 0
color_dict = {
cluster[0]: counter
for cluster, counter in zip(
cluster_counts.most_common(), range(len(cluster_counts))
)
}
# Don't show colors for clusters below the threshold
for cluster_id in cluster_counts:
if cluster_counts[cluster_id] <= no_color_thresh:
color_dict[cluster_id] = -1
OP_arr = np.linspace(0.0, 1.0, max(color_dict.values()) + 1)
# Get hex colors for all clusters of size greater than no_color_thresh
for old_cluster_index, new_cluster_index in color_dict.items():
if new_cluster_index == -1:
color_dict[old_cluster_index] = no_color
else:
color_dict[old_cluster_index] = cmap(OP_arr[new_cluster_index])
return color_dict
We load the simulation data and call the analysis functions defined above. Notice that we use 6 nearest neighbors, since our system is made of hexagons that tend to cluster with 6 neighbors.
[2]:
ex_data = np.load("data/MatchEnv_Hexagons.npz")
box = ex_data["box"]
positions = ex_data["positions"]
orientations = ex_data["orientations"]
aq = freud.AABBQuery(box, positions)
cluster_index_arr, cluster_envs = get_cluster_arr(
aq, num_neighbors=6, threshold=0.2, registration=False
)
color_dict = color_by_clust(cluster_index_arr, no_color_thresh=5)
colors = [color_dict[i] for i in cluster_index_arr]
Below, we plot the resulting clusters. The colors correspond to the cluster size.
[4]:
plt.figure(figsize=(12, 12), facecolor="white")
aq.plot(ax=plt.gca(), c=colors, s=20)
plt.title("Clusters Colored by Particle Local Environment")
plt.show()